












畸變
作者: Gregory Hollows, Nicholas James
成像資源指南第3.3部份
術語「畸變」經常與圖像品質下降互換使用。畸變是不會從技術上減少圖像中資訊的個別像差;而大多數像差實際上會混在一起,造成圖像模糊,畸變只是從幾何學上讓資訊錯位。這意味著,畸變實際上可以從圖像計算或映射,然而,來自其他像差的資訊實際上已在圖像中丟失並且無法輕鬆重建。更多像差詳情請參考 像差。請注意,在極高畸變度環境中,某些資訊與細節可能因分辨率隨著放大倍率而變化或因太多資訊擠在單一像素上而丟失。
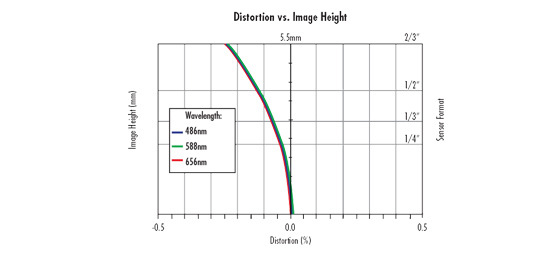
失真是一種單色光學像差,描述了於固定工作距離下圖像中放大倍率在視場範圍內的變化情況;這在精密機器視覺與計測應用中極其重要。畸變不同於視差,視差是指隨著工作距離而發生之放大倍率(視場)變化(有關視差的更多資訊,詳見遠心度的優勢中有關遠心度的內容)。務必記住,畸變隨著波長而變化,如圖1中所示。當從機器視覺系統校準畸變時,需要考慮照明的波長。如圖1中的曲線對決定如何校準畸變非常有幫助。
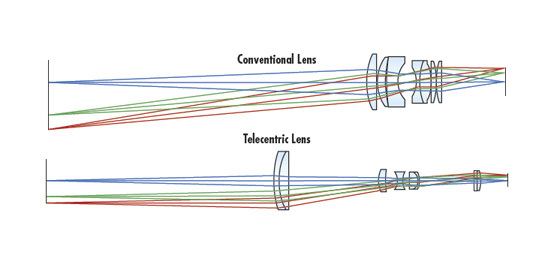
與其他像差一樣,畸變是由鏡頭的光學設計決定。具有較大視場的鏡頭,一般會因其依賴於三次體而展現更大的畸變。畸變為第三階像差,對於簡單的鏡頭,它會隨著場高的三次方而增大;這意味著,較大視場(由低放大倍率或短焦距產生)比較小的視場(由高放大倍率或長焦距產生)更容易出現畸變。應在短焦距鏡頭實現的寬視場與系統中引入之像差(例如畸變)之間權衡利弊。另一方面,遠心鏡頭通常具有極低的畸變:它們的工作原理決定的。還必須注意,當設計具備最低畸變的鏡頭時,鏡頭的最高分辨率會下降。為了將畸變減到最低同時維持高分辨率,透過在設計中加入鏡片或利用更複雜的光學玻璃,系統的複雜度一定會有所增大。

圖 1: 顯示畸變相對波長而變化的畸變圖。
畸變通常被指定為場高的百分比。通常,若不使用測量算法,視覺系統中±2到3%的畸變不會被注意到。在簡單鏡頭中,主要有兩種畸變:正畸變,筒形畸變,其中視場中的點顯示得太靠近中心;以及負畸變,枕形畸變,其中點離中心太遠。桶形和枕形是指在出現兩種畸變時矩形場會形成的形狀, 如圖 2中所示。

圖 2: 正負畸變的圖解。
要計算畸變,只需使用 公式1將圖像的實際距離(AD)與預計距離(PD)變化。這可透過使用點型畸變測試板等圖案來做到,如圖 3中所示。
務必注意,雖然鏡頭中畸變的趨勢一般非負即正,對於多片鏡組的鏡頭,畸變在成像視場上不一定是線性。此外,隨著波長改變,畸變也發生變化。最後,畸變大小會隨著工作距離改變而變化。最後,每隻鏡頭在不同的應用需求時需要考慮到使用條件,來消除系統的畸變得到最好的準確度。
畸變曲線的範例
圖 3 顯示了35mm鏡頭系統中的枕型或桶形畸變。在此特定範例中,所分析的所有波長都具有幾乎一致的畸變,因此不存在與波長有關的問題。

圖 3: 鏡頭中的負或桶形畸變。
在 圖 4, 您可看到一組有趣的畸變特性:首先,不同波長的畸變都是分離的;第二,此鏡頭中存在負畸變和正畸變。這種畸變曲線有點像波浪狀或是鬍型。這種畸變常見於專為實現非常低畸變而設計的鏡頭,例如那些為測量與計測而設計的鏡頭。在此應用條件下需要考量到不同波長因應不同的應用 使用軟體校正將系統畸變消除,可需要特殊考慮使用不同波長的應用。

圖 4: 鏡頭中的波形或鬍形畸變。
幾何畸變與TV畸變:一個重要差別
在鏡頭數據表中,畸變通常被指定為下列兩種之一:徑向、幾何畸變或RIAA TV畸變。幾何畸變描述了畸變圖像中點顯示之處與它們在完美系統中所在處之間的距離。實際上,這可使用畸變測試板來測量。從視場中心到視場中任意點之間距離,與從影像中心到現已錯位的相同點 (如圖 5中所示), 之間距離的差別,用於透過公式3.1來計算徑向失真百分比。

圖 5: 校準目標(紅圈)與成像的(黑點)點畸變圖案。
TV畸變的測量是由RIAA成像標準指定,並透過內圍或外圍的垂直視場之方形目標進行成像來確定。方形邊角和中心邊緣之間的高度差別用於透過公式3.2來計算TV畸變;這描述了圖像邊緣顯示之線條的明顯直線度,實質上為單一視場點的幾何失真。
僅透過指定視場中一個點的畸變,可能會將非零畸變鏡頭曲解為具有0%畸變。在 圖 4中, 對於所示之任何波長,可找到0%位置。但是,當考慮完整的圖像圈後,很顯然鏡頭具有非零畸變。圖 6中顯示了如何 尋找TV畸變的範例。

圖 6: 帶桶形畸變及枕形畸變的TV畸變。
如 圖 4所示,現實世界中,成像鏡頭模組的畸變不一定是單向的,它是可在視場內變化,這就是徑向畸變圖比單一RIAA值更可取的原因所在。有鑑於指定它的方式,TV畸變值可能比相同鏡頭的最大幾何畸變值要低得多,因此,必須清楚在為應用選擇最適宜之鏡頭時應該指定什麼類型的畸變。
梯形失真
除了前面所提及之鏡頭光學設計所固有的畸變類型外,不當的系統對位調整也可導致梯形失真,進而產生視差 (如 圖 7中所示)。


圖 7: 梯形畸變的範例
當根據畸變校準成像系統時,除了徑向幾何畸變外,還應考慮梯形失真。儘管畸變通常被視為外型像差,但在選擇正確的鏡頭時,應該對照其他系統規格來仔細考慮。除了遺漏圖像資訊的可能外,幾何畸變校正還會增加額外系統處理運算時間和資源,這在高速或嵌入式應用中可能是無法接受的。
























































































or view regional numbers
QUOTE TOOL
enter stock numbers to begin
Copyright 2023, Edmund Optics Inc., 14F., No.83, Sec. 4, Wenxin Road, Beitun District , Taichung City 406, Taiwan (R.O.C.)
California Consumer Privacy Act (CCPA): Do Not Sell My Information