












進階鏡頭選型
成像資源指南第6.3部份
前面章節說明了基礎鏡頭選型過程。如何在機器視覺系統中挑出一個鏡頭。 本節全面介紹鏡頭和相機的選型,同時挑選相機與鏡頭,具體條件最終取決於應用上關注重點。本節將藉由案例工作距離200mm,需要二維條碼的取像開始,如 圖 1所示。

圖 1: WD 200mm遠的二維掃碼取像。
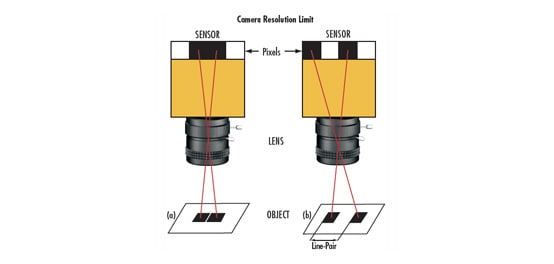
鏡頭選型基本的第一步要從被檢查的物件和其構成方式開始。 重要的是要觀察什麼特徵? 這些特徵點有多大? 機器視覺軟體上判定這些特徵點需要用幾個像素點才能正確地判定 ?
通常,最好的評估方式像素點可以覆蓋特徵點大小。對於 圖 1, 中的二維條碼,它們是相當簡單圖案。其中的特徵尺寸約為100μm,特徵點之間的空白間隔至少為100μm。這表示特徵點對應的物空間頻率為 5$ \small{ \tfrac{\text{lp}}{\text{mm}}} $ (請參閱有關 分辨率計算的數學式) 這個數值與接下來決定鏡頭所需的放大倍率有關 。
接下來,需要考慮整個視野大小。這不僅意味著條碼本身的大小,但必須考慮到條碼本身不完全落在FOV正中心的狀況。 如果條形碼為25mm x 25mm,則可以考慮將FOV定為35mm讓FOV多點空間可以容納條碼擺放上的誤差。在此案例中,必須至少使用三個像素覆蓋條碼中的特徵點來解析。由於條形碼上的特徵尺寸為100μm,因此要求物空間上每個像素點大小至少有33μm。
在這一點上,可以評估不同的相機,看是否為了達成前面應用的要求。 為了使建置成本最低,盡可能從低的解析度開始選起。 在現行的機器視覺世界通常最低是0.3 MP或VGA解析度(640x480)。然後檢查傳感器的寬高比,正好是4:3。 但是這次應用需要的是1:1的FOV; 這意味著傳感器的尺寸較小的區域(480像素)將需要用於對應35mm FOV,並且較大的像素區域可視為多餘的,那些基本上是用不到的。
由於480個像素在35mm區域內劃分,每個像素約對應物空間中的73μm。 該相機解析度不足以用於此應用,因此需要具備大約好三倍的解析度,所以調整為1600x1200像素為4.5μm的傳感器計算,每個像素現在佔用29μm,這樣看起來滿足應用。但這樣狀況下如何把應於相機的像空間和鏡頭連接起來? 此時,系統需要與放大倍率參數連接起來。
知道傳感器解析度為1600X1200像素,加上已知的像素大小4.5um,可以算出傳感器尺寸為7.2毫米x 5.4毫米。 使用 基礎鏡頭選型 裡的 公式 4,算出放大倍率為0.15X。 現在利用此放大倍率確定需要哪種鏡頭以及從分辨率的角度確認成像系統的要求,作正確的讀碼成像。 由於傳感器已經選定,因此可以根據 基礎鏡頭選型 裡的 公式 3 計算鏡頭焦距。 使用 公式 3,WD200mm條件下所需的焦距為30mm。另外一個接近的鏡頭規格,焦距25毫米鏡頭工作距離230毫米可達到0.15X放大倍率; 因此這個焦距鏡頭滿足這個應用。 現在一個初步鏡頭規格焦距已經選出來,但可以確認其分辨率滿足分辨率的需求嗎 ?
物空間所需的分辨率為 5$ \small{ \tfrac{\text{lp}}{\text{mm}}} $。 把它除上放大倍數變成像空間分辨率,變成 33$ \small{ \tfrac{\text{lp}}{\text{mm}}} $ 。為了正確查看對象。 此數值碼需要驗證兩個參數字:傳感器的奈奎斯特頻率和使用的鏡頭的調製傳遞函數 (MTF)。 看到 分辨率 ,以獲取有關奈奎斯特頻率的更多資訊。公式 1 將傳感器的奈奎斯特頻率描述為:
其中s是像素大小。使用 公式 1, 像素為4.5μm的傳感器奈奎斯特頻率為 111$ \small{ \tfrac{\text{lp}}{\text{mm}}} $。 因為這個頻率遠比 33$ \small{ \tfrac{\text{lp}}{\text{mm}}} $,因此這台相機是一個不錯的選擇用在這個應用上。 有些精明的讀者可能請注意,這將鏈接到以下事實:我們考慮三個像素覆蓋讀碼的一個特徵點,因此會得到奈奎斯特低3倍頻率也就不足為奇了。出於完整性考慮,這邊討論完整的用數學計算出來。
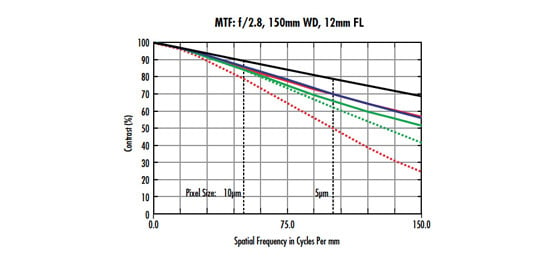
C系列25mm定焦鏡頭性能可以在 圖 2 中找到在WD166mm下的MTF性能曲線 (有關更多信息,請參見如何讀取MTF曲線,請參見 調製傳遞函數)。從曲線上,可以看到25mm鏡頭達到了 33$ \small{ \tfrac{\text{lp}}{\text{mm}}} $ 位置達到83%的對比度,這樣的對比度足夠提供清晰的成像。

圖 2: 這張25mm C系列定焦鏡頭的MTF曲線圖說明它可以提供足夠的分辨率在這個應用上。
一般經驗法則,對成像鏡頭正確分辨物體的要求是最小對比度值是達20%,這代表此鏡頭分辨率足以滿足讀碼的應用 。
這只是冰山一角關於鏡頭選型的應用。 MTF另外受幾個因素的影響 (請參見 調製傳遞函數), 通常不是一言兩語就說得明白的。 以下部分將詳細介紹鏡頭如何匹配一個合適相機。
鏡頭性能的變化
鏡頭供應商可以根據使用條件提供特定條件下的鏡頭MTF曲線。 在上面的條碼應用中,挑選25mm的鏡頭MTF曲線來確認鏡頭是否有足夠的對比度應用在讀碼上參考鏡頭以確定其是否具有足夠的對比度 現在,我們將這支鏡頭延伸到不同的案例上討論進行,使用相同的鏡頭,但是無法一如你期待的產生一樣的高對比度。
圖 3顯示了同一個焦距25mm鏡頭的兩條不同MTF曲線,同一樣的WD(0.076倍)下,但f /#和波長設定條件不同。 從曲線上看很難想像這是同一個鏡頭! 重要的一點是,只看MTF規格表上的曲線不能充分說明性能,鏡頭需考慮整體應用條件下的MTF曲線。


圖 3: 高分辨率 25mm 鏡頭在不同設定下呈現出不同的MTF曲線,因此務必對具體鏡頭曲線進行比較。
根據鏡頭的MTF,就可以確定物空間中的最小可分辨特徵尺寸。但是,MTF 曲線永遠處於像空間中,意味著必須將像空間規格轉化為物空間規格。幸運的是,可以輕易地用鏡頭放大倍率做計算。以下範例說明了如何使用 圖 3 中的曲線作為開始來完成這些計算。假設本例中的最小對比度為20%,透過尋找曲線上對應於20%對比度的頻率,我們可以得知上面鏡頭的像空間分辨率為 250$ \small{ \tfrac{\text{lp}}{\text{mm}}} $ 。使用 公式 2, 像素大小(或在此種情況下,將像空間分辨率從頻率轉化為物體大小)計算如下:
$ \small{\xi _{\small{\text{Image Space}}}} $
然後透過放大倍率 (0.076X) 進行縮放:
對比後發現, 圖 3 c底部的曲線所代表的鏡頭只能準確地對 26μm 的物體形成圖像(使用上述相同計算方法)。以上範例還假設尚未選定合適相機/傳感器,因而使光學元件成為成像系統的限制條件。如果在選擇鏡頭之前已選定相機傳感器,則鏡頭可能需要具備解析所用傳感器的像素大小的能力。
繼續根據上例進行分析,如果選用Sony IMX250 傳感器(像素大小為 3.45μm)的相機,則使用 公式 2 計算可以得出,像空間分辨率為 144.9$ \small{ \tfrac{\text{lp}}{\text{mm}}} $ 。從 MTF 曲線中可以看到,上方鏡頭的對比度大於 40%,足以滿足大部分應用的要求。但利用這類計算方式轉化成物空間尺寸時,3.45μm 像素僅對應於 45μm 的物體,意味著傳感器會變成系統的限制元件,因為鏡頭可以達到 26μm 的物空間分辨率。針對應用挑選合適鏡頭時,必須全盤考慮所有這些因素,以便為機器視覺問題提供最佳的解決方案。






















































































or view regional numbers
QUOTE TOOL
enter stock numbers to begin
Copyright 2023, Edmund Optics Inc., 14F., No.83, Sec. 4, Wenxin Road, Beitun District , Taichung City 406, Taiwan (R.O.C.)
California Consumer Privacy Act (CCPA): Do Not Sell My Information