












分辨率
作者: Gregory Hollows, Nicholas James
成像資源指南第2.2部份
成像系統的分辨率可以視為對重現待測物細節的重要性能指標,並且由許多因素所影響,如照明光源,傳感器的像素大小,或其他光學元件的性能。待測物的細節越小,需要的分辨率就越高。
將傳感器上的水平或垂直像素數量劃分為希望觀察的物體尺寸,代表每個像素在物體上覆蓋的空間量,並且可用於評估解析度。但是,這並不能真正確定是否能將該像素上的訊息與任何其他像素上的訊息加以區分。
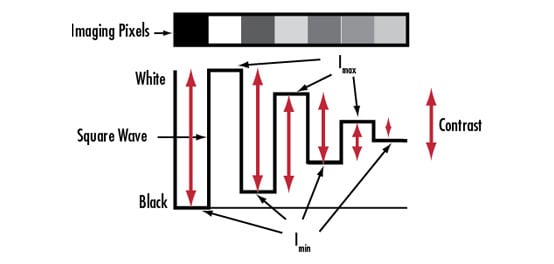
首先,務必瞭解哪些因素可以實際限制系統分辨率。圖 1 顯示了一則範例:白色背景上有一對方形。如果這對方形在相機傳感器上相鄰像素間成像,則會在圖像中顯示為一個較大的矩形(a),而不是兩個單獨的方形(b)。為了區分這兩個方形,需要在它們之間留出一定的空間(至少一個像素)。這一最小距離就是系統的極限分辨率。此極限是由傳感器的像素大小以及傳感器的像素數量來定義。

圖 1: 解析兩個方形。如果方形之間的空間過小(a),相機感測器將無法將其分辨為單獨的物體。
線對和傳感器限制
分辨率通常被視為一個量測單位。分辨率的概念不能由鏡頭或系統可解析的最小尺寸分辨率來定義。解析度更準確描述為頻率,用線對每毫米(lp /毫米)表示。線對是像空間中的一對黑色和白色正方形。不幸的是,鏡頭分辨率不是絕對的。在給定的分辨率下,將兩個方形可以完整判別與否取決於灰階上。如果方形之間的距離增加產生的灰階值更大,則系統可以更輕易的解析 (圖 1b)。 這種灰階差異稱為對比度。
因此,分辨率定義為空間頻率,單位為lp/mm,可以達到特定的對比。不同鏡頭和相機廠都會定義對比度的性能,但對於鏡頭上通常定義為20%。因此,如果已知傳感器和應用檢查時, 用 lp / mm 的值來做鏡頭比較和鏡頭選定時非常有用。 更多詳情請參閱 對比度)。
傳感器是系統的所在分辨率計算開始。從傳感器開始,更容易選定與傳感器匹配所需的鏡頭性能或其他應用要求。最高可分辨頻率奈奎斯特頻率傳感器實際上是兩個像素或一對線對。表 1顯示了與Nyquist極限有關的像素尺寸一些常見的傳感器。傳感器的分辨率(ξSensor),以作為系統的像空間分辨(ξImageSpace),通過將像素大小S(通常以微米為單位)乘以2(成為一組),然後將其除以1000以轉換為mm:
像素較大的傳感器具有較低的分辨率。像素較小的傳感器具有較高的分辨率。更多詳情請參閱 從鏡頭到傳感器:收光限制。 利用此資訊,可以計算出要檢視之物體上的分辨率。若要規劃系統分辨率,必需瞭解傳感器尺寸、視場和傳感器上的像素數量之間的關係。
傳感器尺寸為指相機傳感器有效區域的大小,通常由傳感器格式大小 (更多詳情請參閱 傳感器) 所規範。但是,部分的傳感器比例會視長寬比不一樣,而且常規傳感器格式應該僅用作參考,特別是對於遠心鏡頭和高放大倍率物鏡。傳感器尺寸可以直接根據像素大小和傳感器上的有效像素數量來計算 (p) 。
| Pixel Size (µm) | Associated Nyquist Limit $ \left( \tfrac{\text{lp}}{\text{mm}} \right) $ |
|---|---|
| 1.67 | 299.4 |
| 2.2 | 227.3 |
| 3.45 | 144.9 |
| 4.54 | 110.1 |
| 5.5 | 90.9 |
表 1: 隨著像素大小增加,對應的奈奎斯特限制 (lp/mm)線對數會變低 。
物空間分辨率
要確定可在物體上看到的絕對最小可分辨的點,需要計算視場與傳感器尺寸的比值。該比率亦稱系統的主要放大倍率(PMAG)。
系統放大倍率將像空間分辨率擴展到物空間分辨率 $ \left( \xi _{\small{\text{Object Space}}} \right) $.
當在開發系統時,系統的解析度要求並未以鏡頭的lp/mm給定,而是以微米(μm)或英吋給定。進行此轉換有兩種方式:
儘管使用者可透過使用上一個公式來快速得出物方的極限分辨率,但確定像空間分辨率和PMAG以簡化鏡頭選擇也會很有幫助。另外還務必注意,這一過程涉及許多其他因素,而且此極限通常會遠低於使用公式簡易計算得出的值。有關鏡頭和對比度限制的更多資訊,請參閱 对比度 和 成像鏡頭選型指南。
使用Sony ICX 625傳感器的分辨率和放大倍率
計算範例
已知參數:
像素大小= 3.45 × 3.45μm
像素數量 (水平 x 垂直)= 2448 × 2050
所需視場 (水平)= 100mm
傳感器分辨率:
\begin{align} \xi_{\small{\text{Image Space}}} & = \left( \frac{1}{2 \times s} \right) \times \left( \frac{1000 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}}}{1 \text{mm}} \right) \\ & = \left( \frac{1}{2 \times 3.45 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}}} \right) \times \left( \frac{1000 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}}}{1 \text{mm}} \right) \approx 145 \tfrac{\text{lp}}{ \text{mm}} \end{align}
傳感器尺寸:
$$ H_{\small{\text{Horizontal}}} = 3.45 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}} \times 2448 \times \left( \frac{1 \text{mm}}{1000 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}}} \right) = 8.45 \text{mm} $$
$$ H_{\small{\text{Vertical}}} = 3.45 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}} \times 2050 \times \left( \frac{1 \text{mm}}{1000 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}}} \right) = 7.07 \text{mm} $$
倍率:
$$ m = \frac{8.45 \text{mm}}{100 \text{mm}} = 0.0845X $$
分辨率:
$$ \xi_{\small{\text{Object Space}}} \left[ \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}} \right] = 145 \tfrac{\text{lp}}{\text{mm}} \times 0.0845 = 12.25 \tfrac{\text{lp}}{\text{mm}} \approx 41 \large{\unicode[Cambria Math]{x03BC}} \normalsize{\text{m}} $$

































































































































































































or view regional numbers
QUOTE TOOL
enter stock numbers to begin
Copyright 2023, Edmund Optics Inc., 14F., No.83, Sec. 4, Wenxin Road, Beitun District , Taichung City 406, Taiwan (R.O.C.)
California Consumer Privacy Act (CCPA): Do Not Sell My Information