需要我們的協助嗎?

與之校準

透過 Edmund Optics®, 相機鏡頭組搭配PixelTraq標定服務升級您的成像系統——整套設備預先裝配、調焦並完成精密標定;瞭解如何提升您的應用性能。
專用客製解決方案根據您的需求配置視場角、工作距離、波長等參數
最佳化精度最佳化標定特徵分布,實現卓越的相機特性分析,並滿足特定應用效能需求
廣泛適用性支援適配 Edmund Optics® 產品目錄中的各類相機鏡頭及常見/客製相機型號。
所有成像系統在呈現真實世界時均存在固有誤差。所有成像系統在呈現真實世界時均存在固有誤差。這些誤差可能源自機械結構的公差、傳感器對準偏差以及光學像差,最終會導致影像中擷取的資訊排列出現不準確。這種不準確性通常被稱為「畸變」。這種不準確性通常被稱為 畸變。相機標定是確定複雜投影函式的過程,該函式表徵了影像畸變特性,從而可將其消除。雖然該技術主要應用於需要精確幾何與深度測量的場景,但對於追求無畸變影像的使用者同樣有益。Edmund Optics® 與Quartus Engineering合作提供相機標定服務,結合Edmund Optics®豐富的相機及鏡頭產品庫與Quartus的專利標定技術PixelTraq。這一創新架構實現了標定流程的全自動化,並採用先進的優化模型,確保成像系統針對特定應用完成精準標定。
目前,我們的標定服務僅適用於TECHSPEC®定焦鏡頭及相容相機,因為這些設備可以牢固固定且無需移動對焦。現階段,我們不提供S接環配置的標定服務。在相關產品頁面,您會看到「標定服務」索引標籤,點選後將跳轉至 PixelTraq 相機標定服務報價工具,您可在該工具中選擇相機、鏡頭、照明顏色、所需相機型號、工作距離和f/#值。表格填寫完成後,我們的機器視覺銷售工程師團隊將收到通知,並會儘快與您聯絡,進一步討論您的應用需求。您能向工程師團隊提供的應用需求資訊越詳細,我們就能更好地為您提供合適的標定參數設定。
| 服務類型 | 參數規格 | 範圍/ 選項 |
|---|---|---|
| Base | ||
| 工作距離 | 0.1 - 4.0 m(若需更遠工作距離,可應要求提供) | |
| F/# | 取決於所選硬體 | |
| 標定顏色 | 紅色、綠色、藍色或白色* | |
| 相機型號 | Brown Conrady、Kannala(徑向/完整) | |
| 可選 | ||
| 對焦MTF的視場角 | 取決於所選硬體及客戶需求 | |
| 空間頻率 | 取決於所選硬體及客戶需求 |
* 可應要求提供光譜資料
請注意若需標定服務,需額外增加約 10 天 的交貨週期。
您的訂單將包含:按選定焦距固定組裝的成像系統、標定證書(關鍵調節點採用環氧樹脂固定,防止偏移)所有標定文件均安全儲存在 Quartus 伺服器,可透過證書或硬體上的 QR 碼便捷存取。標定證書包含詳細的內部參數與外部參數、畸變偏差百分比圖表、角度誤差和表面誤差值——這些都能提高您系統的精度。要充分利用這些標定資料,Quartus 會提供API,您可以將其整合到您的應用程式中,或作為自訂代碼的起點。有關相機標定的更多資訊以及如何應用您的標定模型,可掃描標定證書底部的 QR 碼連結,或透過 Quartus 資源庫獲取。
高精度成像系統需要視應用需求定期重新標定。對於易受環境變化、機器振動和高頻率使用影響的應用,最好定期評估機器性能,並在精度下降時重新標定。作為一般準則,許多成像系統建議每六個月至一年重新標定一次。
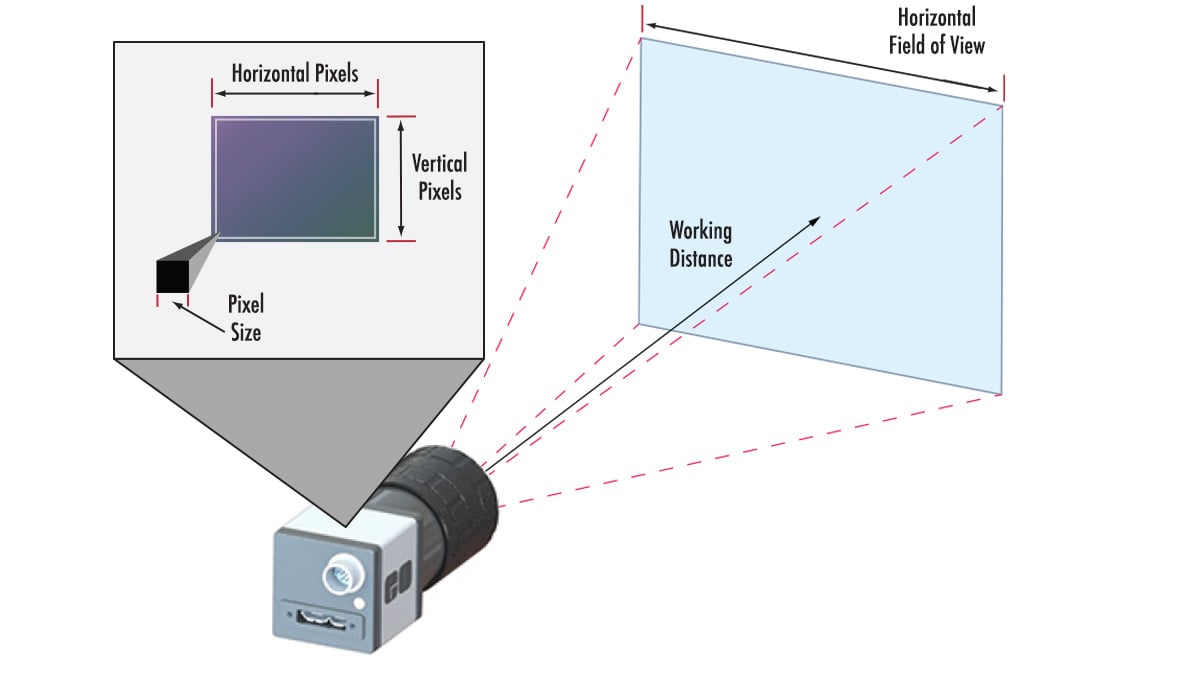
成像系統具有內參和外參因素,這些因素共同提供了關於影像如何形成的重要資訊。內參告知光線如何透過成像鏡頭折射並投射到傳感器。外參告知成像系統在物理世界中的方向和位置。最終,標定是推導數學模型的過程,該模型將來自3D真實場景的光線追蹤到傳感器上畫素陣列的2D映射。PixelTraq標定流程能夠測量系統的內參,並消除由鏡頭折射引起的誤差。這種標定方法特別適用於以下應用:三維檢測、自主機器人和醫療成像,這些應用需要精確的深度感知與空間頻率表徵。
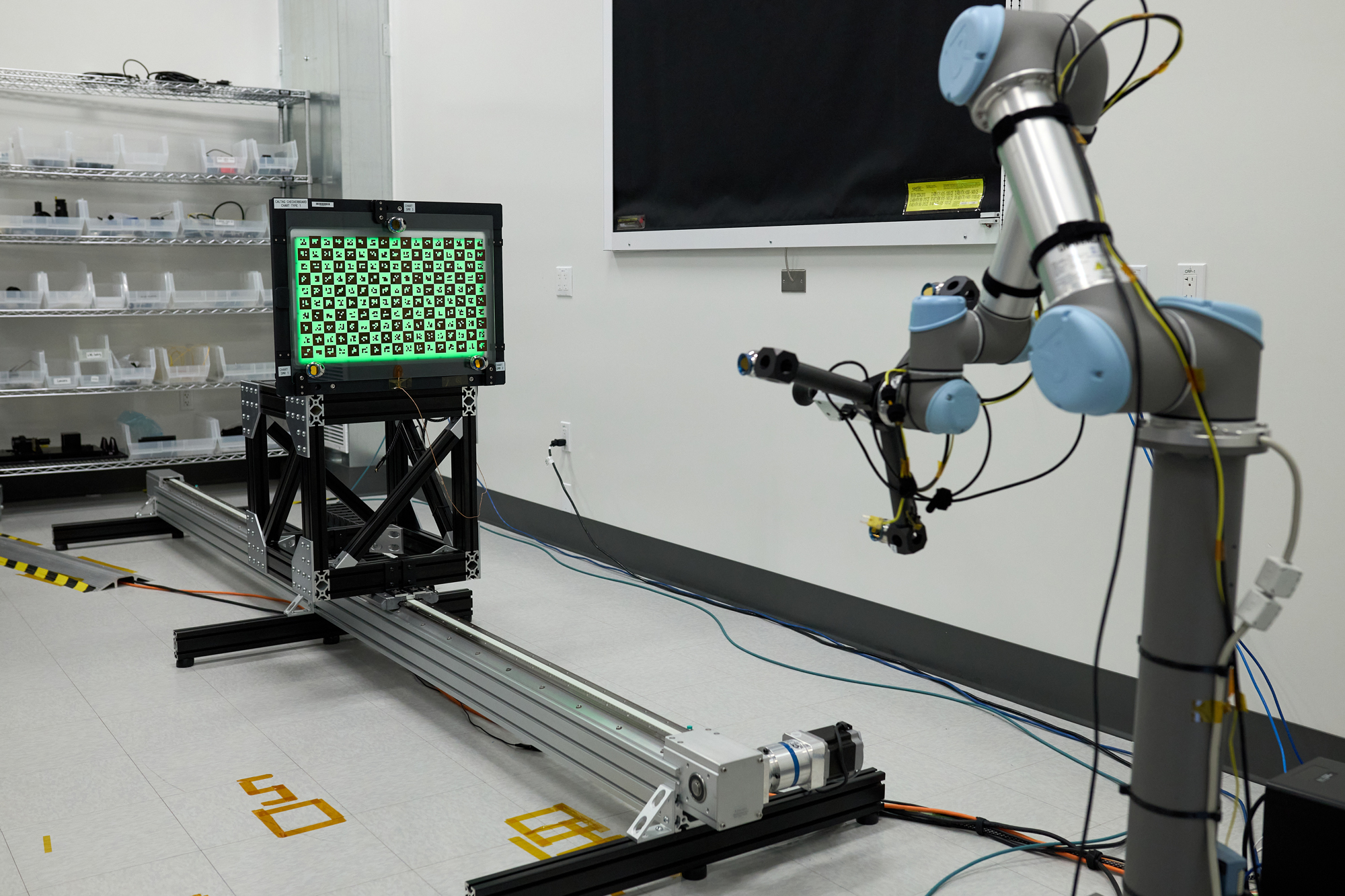
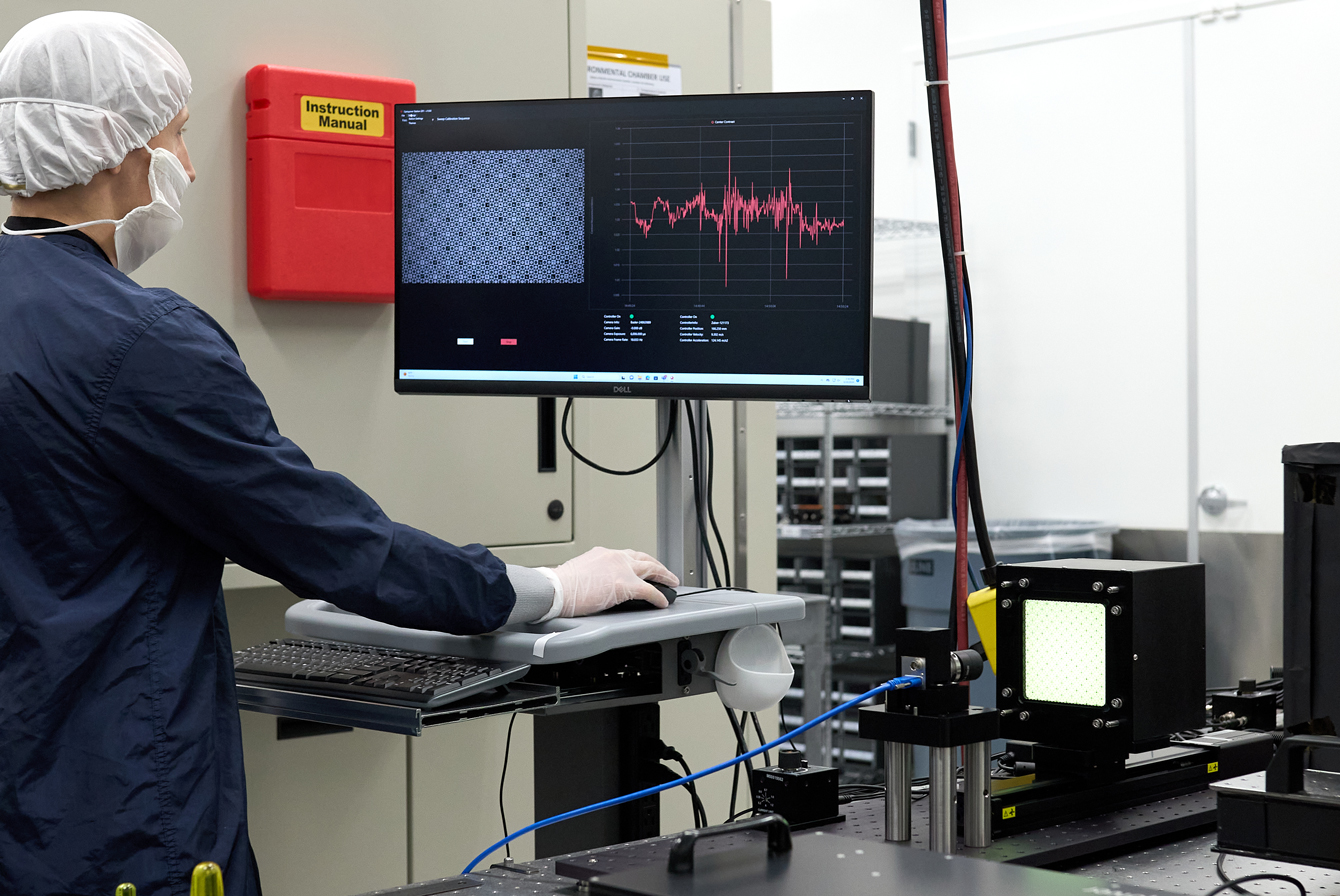
客戶常會嘗試使用列印的棋盤格標靶與開源訓練模型進行自主標定。該流程需要將相機固定於特定位置,然後在完整視場範圍內拍攝標靶影像,並確保影像中的標靶特徵具有足夠重疊區域。當獲得足夠的特徵重疊以建構視場(FOV)內的點雲後,即可開始標定流程。需注意:標定模型的精度本質上受限於所用資料的品質;若未使用可追溯的校準標靶,誤差概率將顯著增加。關於開源方法與PixelTraq差異的更多細節,請參閱 相機標定入門指南 白皮書。PixelTraq透過專用測試臺實現全自動標定流程,可在數分鐘內擷取數千個資料點。這些資料隨後由最佳化演算法進行分析,以確定符合您特定需求的最佳相機模型與點密度。此外,PixelTraq會評估訓練模型中的重投影誤差,從而確定最適合您應用的解決方案。
透過我們的合作夥伴Quartus Engineering提供的白皮書,瞭解更多關於相機校準及其應用的詳細資訊。
相機校準入門指南
瞭解為何您的應用可能需要相機校準,以及基於PixelTraq的方法如何改進您當前的流程。
相機模型入門
相機模型是光線從現實世界傳播到相機成像平面的數學表示。瞭解更多關於相機校準過程中使用的不同類型相機模型。
解讀您的校準結果
學習如何分析和解讀您的PixelTraq校準認證。
要查看所有PixelTraq白皮書,請瀏覽 Quartus的 PixelTraq 資源頁面














or view regional numbers
QUOTE TOOL
enter stock numbers to begin
Copyright 2023, Edmund Optics Inc., 14F., No.83, Sec. 4, Wenxin Road, Beitun District , Taichung City 406, Taiwan (R.O.C.)
Privacy Policy | Cookie Policy | Terms & Conditions | Accessibility
California Consumer Privacy Act (CCPA): Do Not Sell My Information
The FUTURE Depends On Optics®