需要我們的協助嗎?

|
|
擷取角落周圍及障礙物後方的物件影像 |
|
|
光線從隱蔽目標往回散射,可用於重新建構目標 3D 模型 |
|
|
涉及周圍物件對隱蔽目標散射的雷射光 |
|
|
有利於自動車、公共衛生和醫療成像應用的多種潛在效益 |
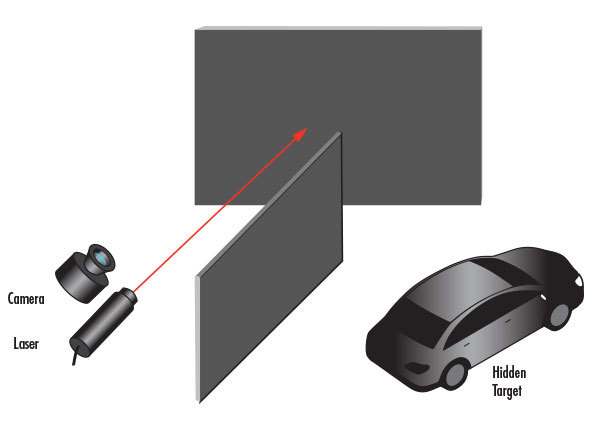
除非是天文學中重力透鏡效應造成光線彎曲等極端案例,否則每種成像應用都要求物件、相機或探測器之間具有直接視線。但大部分的成像應用都受限於直線傳播的光線。不過情況已有所改變,部分頂尖研究成果開創出新的可能性,能夠繞過角落和障礙物進行成像。結合雷射、靈敏相機和運算重建方法,可從周圍物件散射光線,偵測到障礙物所隱蔽的物件。
非直視性成像程序類似於 LiDAR(光達),將雷射脈衝傳送至物件,而光線從物件散射返回的傳播時間,則可用於量測物件與探測器之間的距離。而非直視性成像技術會在此過程中新增另一個散射事件,對受障礙物隱蔽的物件進行成像。1
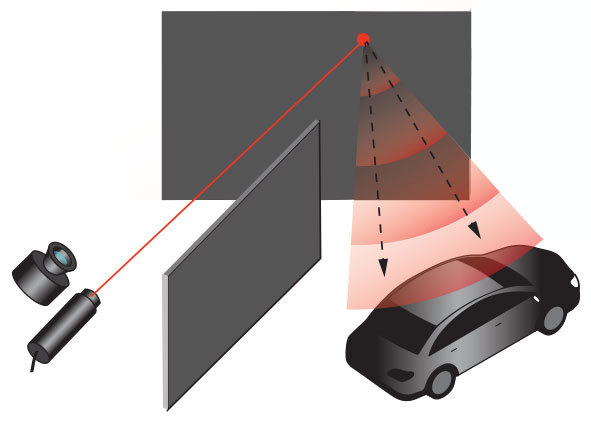
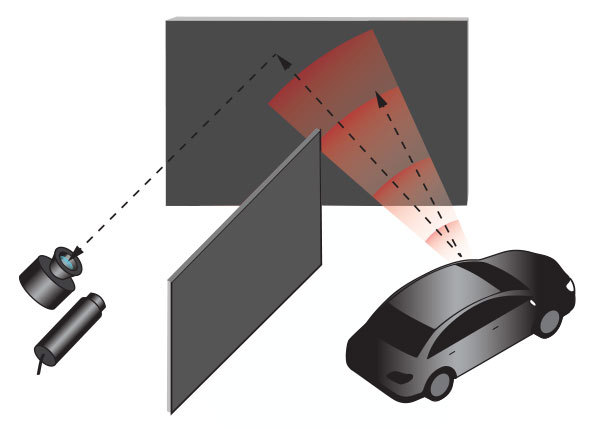
若要即時測量皮秒及飛秒光線脈衝傳播,則需使用單光子雪崩型光電二極體陣列相機等高度靈敏相機。探測器會接收兩種不同的回傳訊號:直接從牆壁散射的初始光線訊號,以及從目標散射的第二光線訊號,系統會將後者用於非直視性成像。這項飛時測距資訊可用於重建一系列橢圓體,全部與隱蔽目標的特定點重疊,可供運算軟體計算相機與隱蔽目標之間的距離,進而重建目標的 3D 模型。
3D 物件可分解為許多可散射光線的個別點。將以上所有點加總,就可重建原始物件的模型。如果探測器能夠以 100ps 的時間分辨率來解析回傳的脈衝,則隱蔽目標上的點可達到約 1.5cm 的空間分辨率。1
可使汽車感測即將進入直接視線範圍的趨近車輛或轉角附近的行人2

可讓執法人員、消防員和醫療急救服務人員在安全距離外偵測危險環境中是否有人2
研究系統直接視線範圍外的小型 3D 結構2
運用這項新興技術開發可供實際應用的解決方案,並且方便攜帶而不對觀測者眼睛造成危險,是一項非常艱鉅的任務。非直視性成像的主要挑戰之一在於只有少量光線會返回探測器,因此探測器必須擷取極少量光線,且不能與其他環境光線混淆。回傳至探測器的訊號源自兩個連續散射事件,因此損耗極高。回傳訊號最低可至每雷射脈衝一個光子。1
不過史丹佛運算成像實驗室 (Stanford Computational Imaging Lab) 已經開發能在戶外間接日照條件下運作的非直視性成像系統。2他們運用復歸反射帶,成功對牆壁遮蔽的物件進行成像,為這項技術的未來帶來正面的展望。
中佛羅里達大學 Aristide Dogariu 實驗室 (The lab of Aristide Dogariu of University of Central Florida) 目前正研究一種非直視性成像技術,運用光線照射牆壁後衍生的空間相干特性,來取代從牆壁及後方目標散射的雷射光。3如此一來,建模隱蔽目標時就不需要使用超高速雷射照明,從而使這項技術在實際應用中更方便攜帶且易於使用。
非直視性成像技術還需要更多發展,才能成為實用的商業系統,但是對新世代的成像應用來說,這項技術是一項前景可期的解決方案。
參考資料1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
 愛特蒙特光學是否銷售完整的非直視性成像系統?
最初從牆壁散射的雷射光,不是比隱蔽目標的第二次散射光更強嗎?
愛特蒙特光學是否銷售完整的非直視性成像系統?
最初從牆壁散射的雷射光,不是比隱蔽目標的第二次散射光更強嗎?
直接從牆壁散射的光線,遠比間接物件的第二次散射光更強,但兩者之間具有有時間延遲,而高靈敏度探測器具有夠高的時間分辨率,可區分這兩種訊號。2
掌控了隱蔽目標第二次散射的時間延遲後,運算重建軟體要如何重建物件 3D 模型?
軟體會先將所有測量結果儲存在 3D 時空體之中,然後沿時間軸重新取樣測量,使用頻域中的逆濾波器捲繞結果,並沿著深度軸重新取樣,進而恢復隱蔽物件。2
取得資料後,要花多少時間重建隱蔽目標的 3D 模型?
史丹佛運算成像實驗室 (Stanford Computational Imaging Lab) 的非直視性成像程序只需 0.5 秒就能產生 3D 模型。2



















or view regional numbers
QUOTE TOOL
enter stock numbers to begin
Copyright 2023, Edmund Optics Inc., 14F., No.83, Sec. 4, Wenxin Road, Beitun District , Taichung City 406, Taiwan (R.O.C.)
Privacy Policy | Cookie Policy | Terms & Conditions | Accessibility
California Consumer Privacy Act (CCPA): Do Not Sell My Information
The FUTURE Depends On Optics®